Daniel Snider
About Me
I am a Computer Science PhD student at U of T, advised by Professor Gennady Pekhimenko. I am part of the Efficient Computing Systems Group within the Computer Systems & Networks Research Cluster. My research aim is to accelerate machine learning systems using compilers, specialized hardware, and profile guided optimization.
My lifelong mission is to develop intelligent systems that can help solve underappreciated global issues such as labour shortages and the high prevalence of dull, dirty, and dangerous jobs.
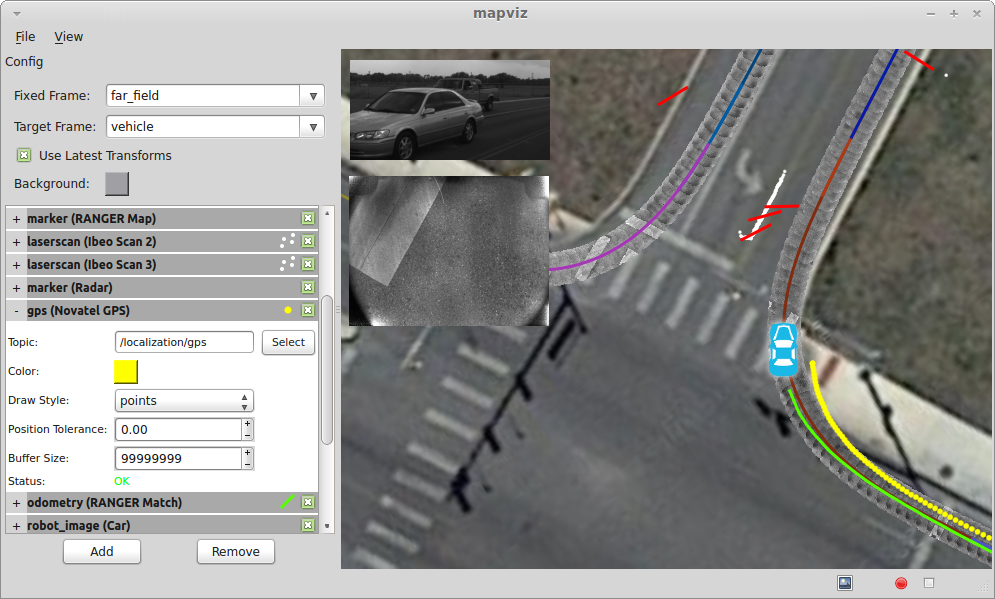
Before starting graduate school, I oversaw data centre infrastructure for clients such as PR Newswire, wrote award-winning computer vision software at the SickKids Research Institute, and published a book chapter about self-driving robotics in Springer’s Studies in Computational Intelligence.
News
Publications




Built with ElasticSearch, Javascript, Python and a 200-node HPC cluster.
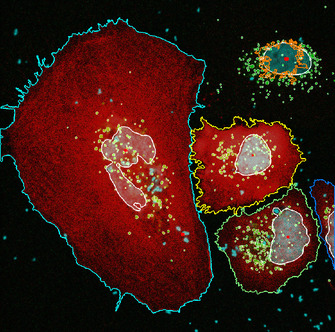
Winner of the Mary Jo Haddad SickKids Innovation Award.

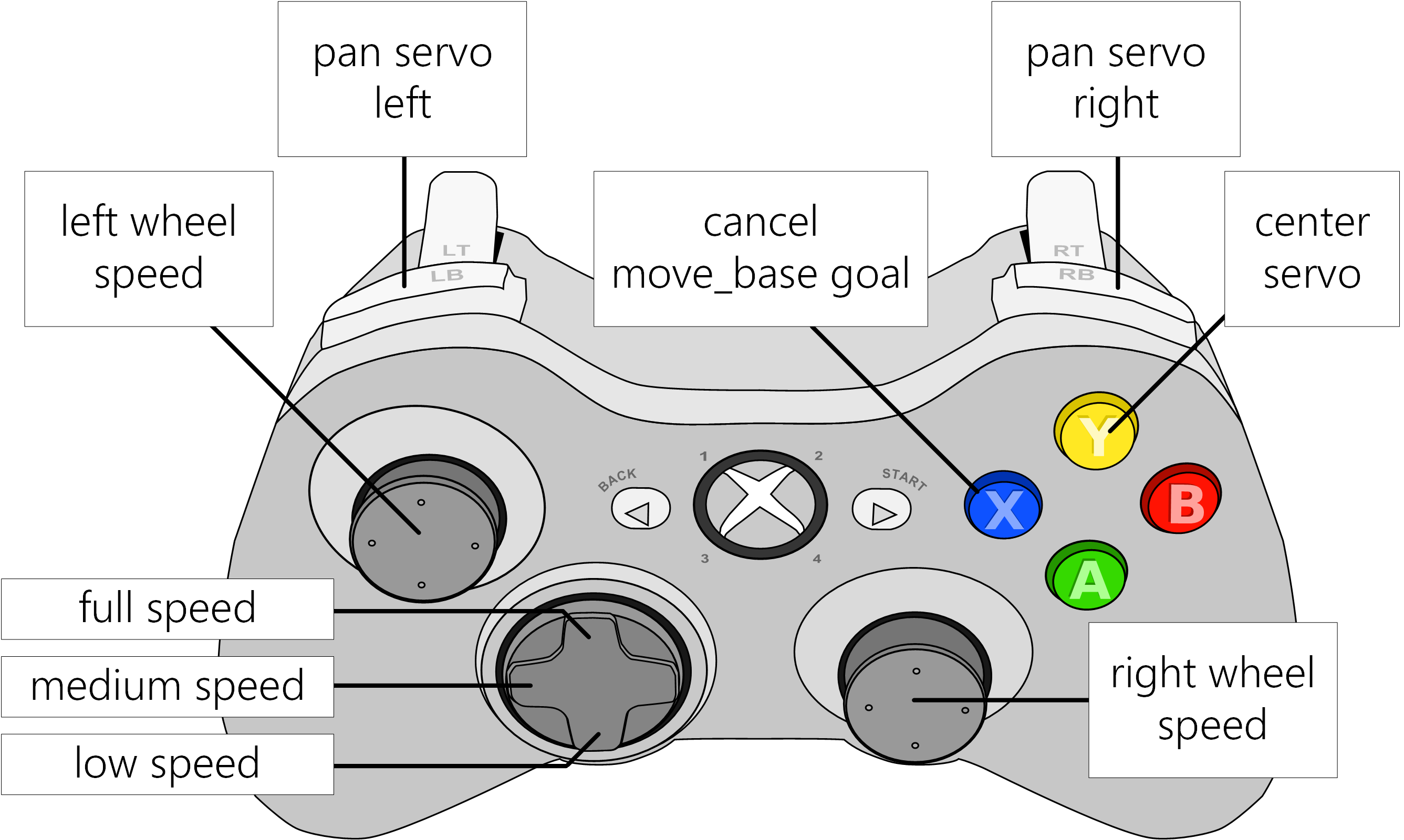
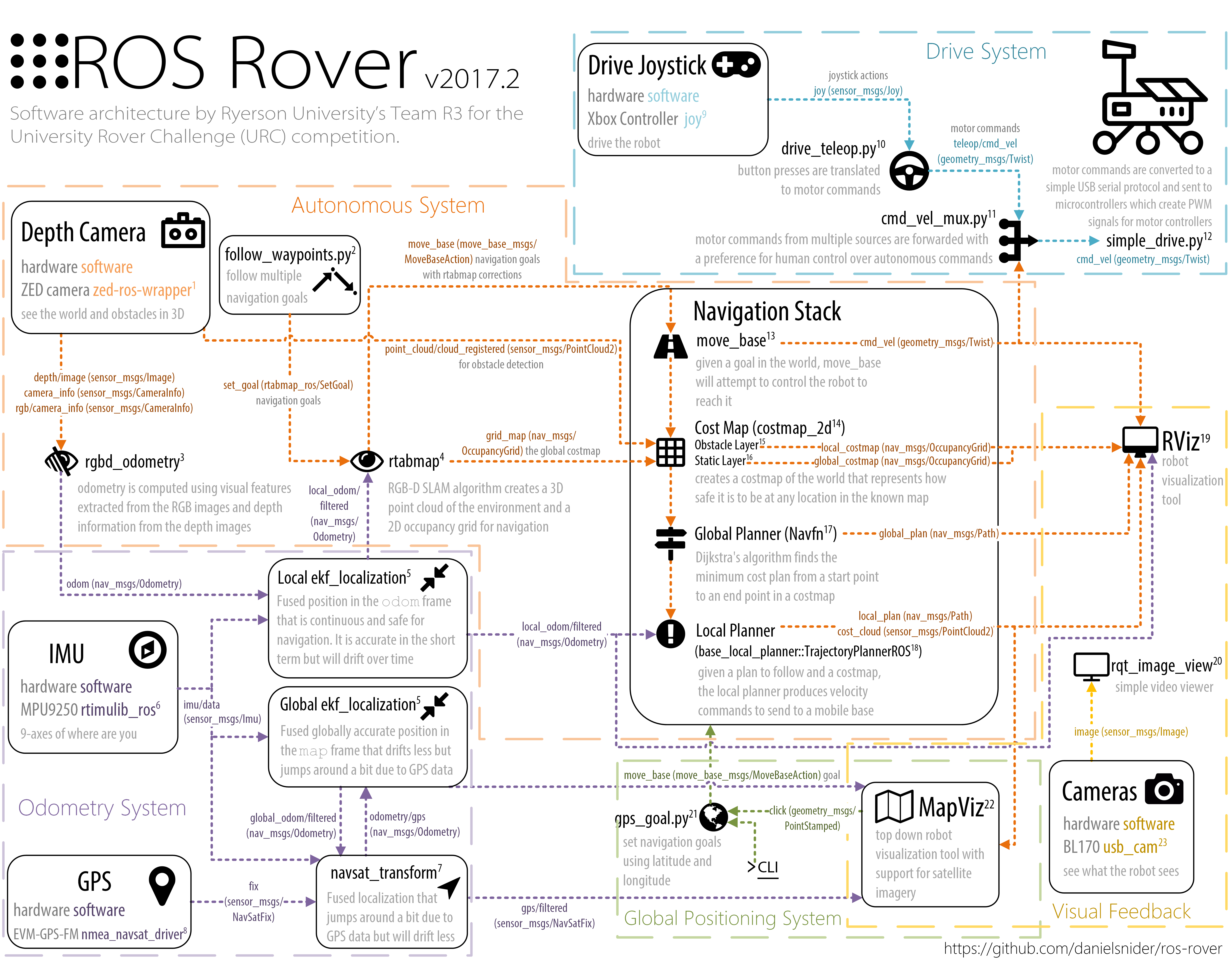
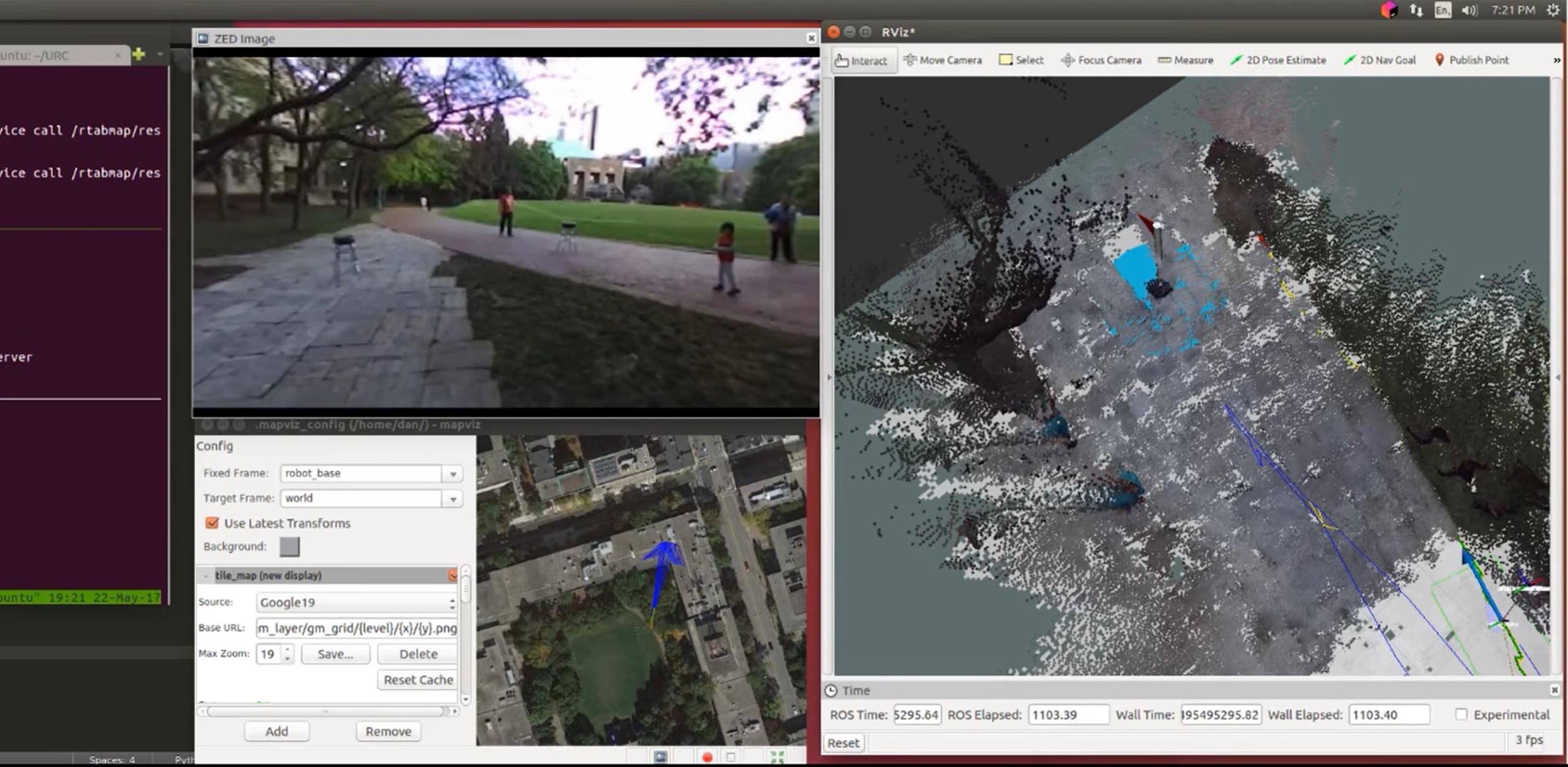
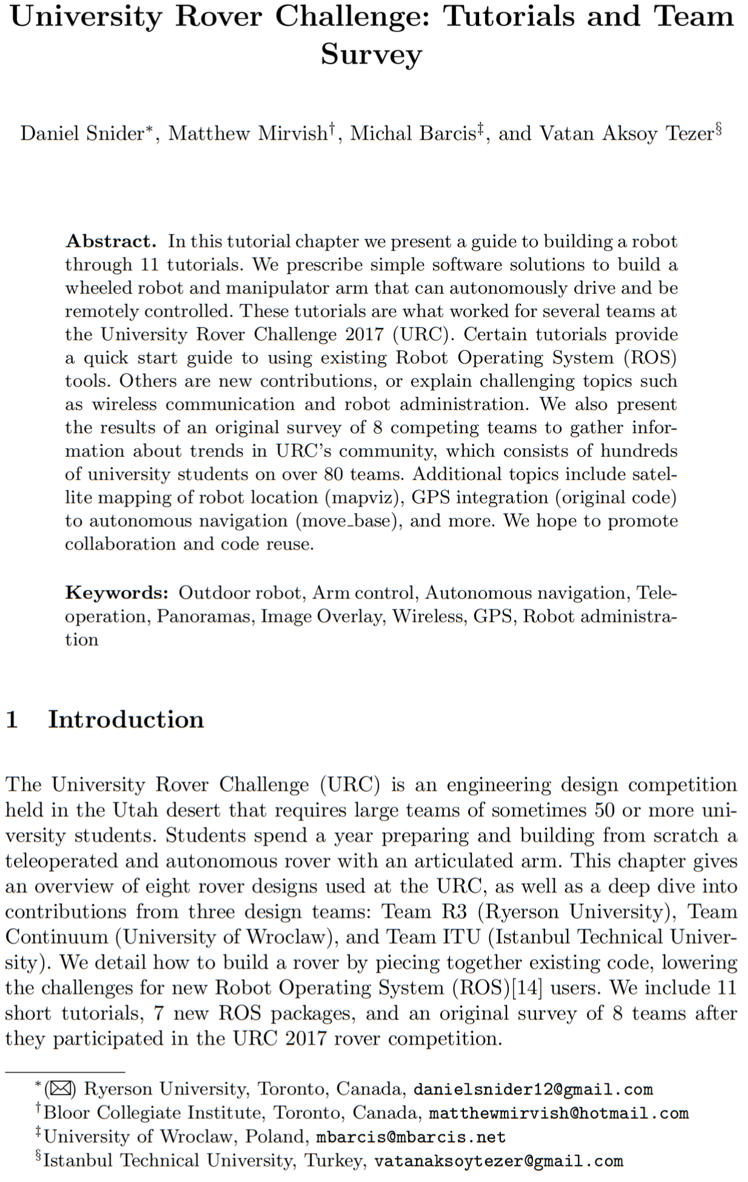
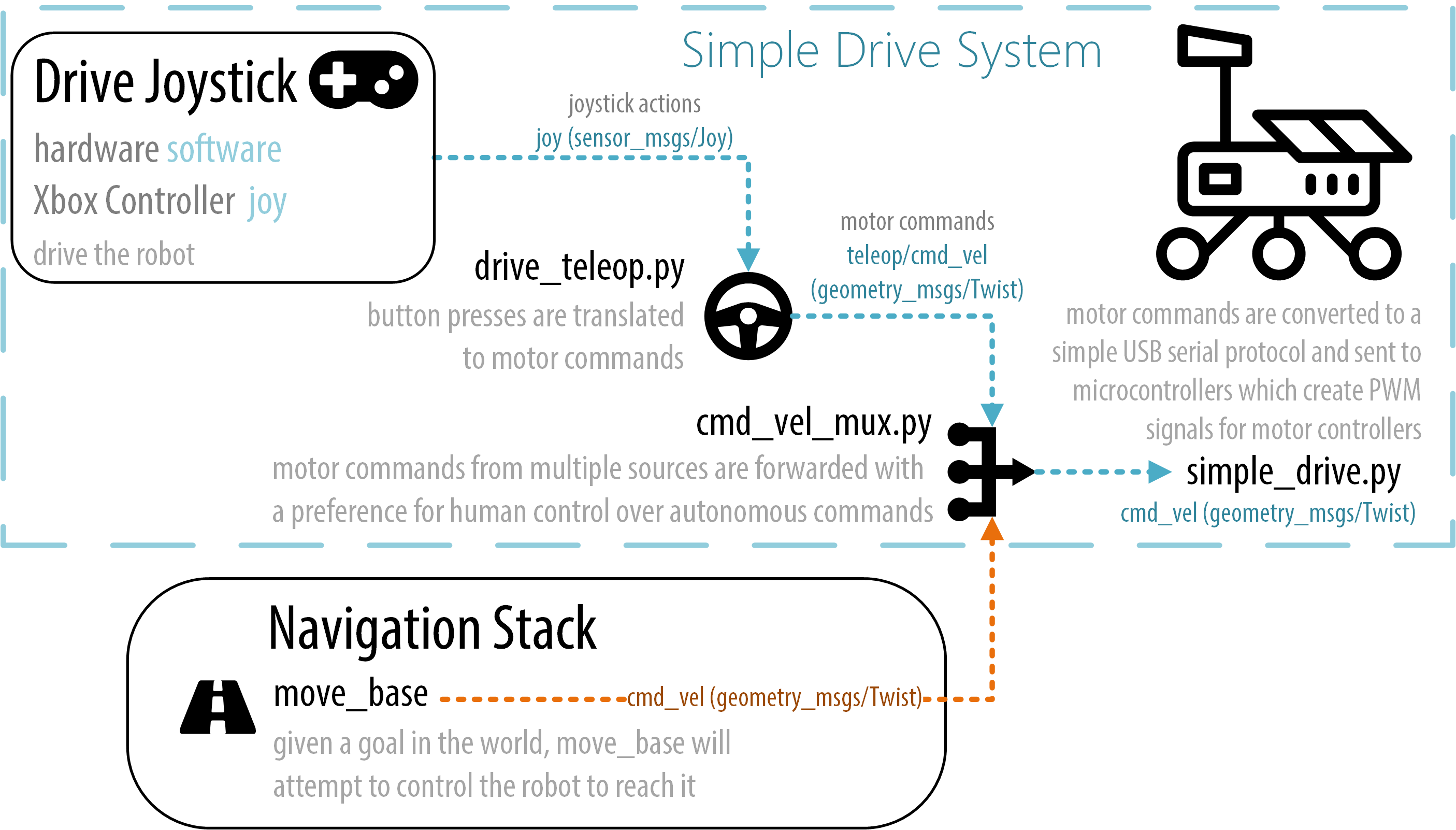
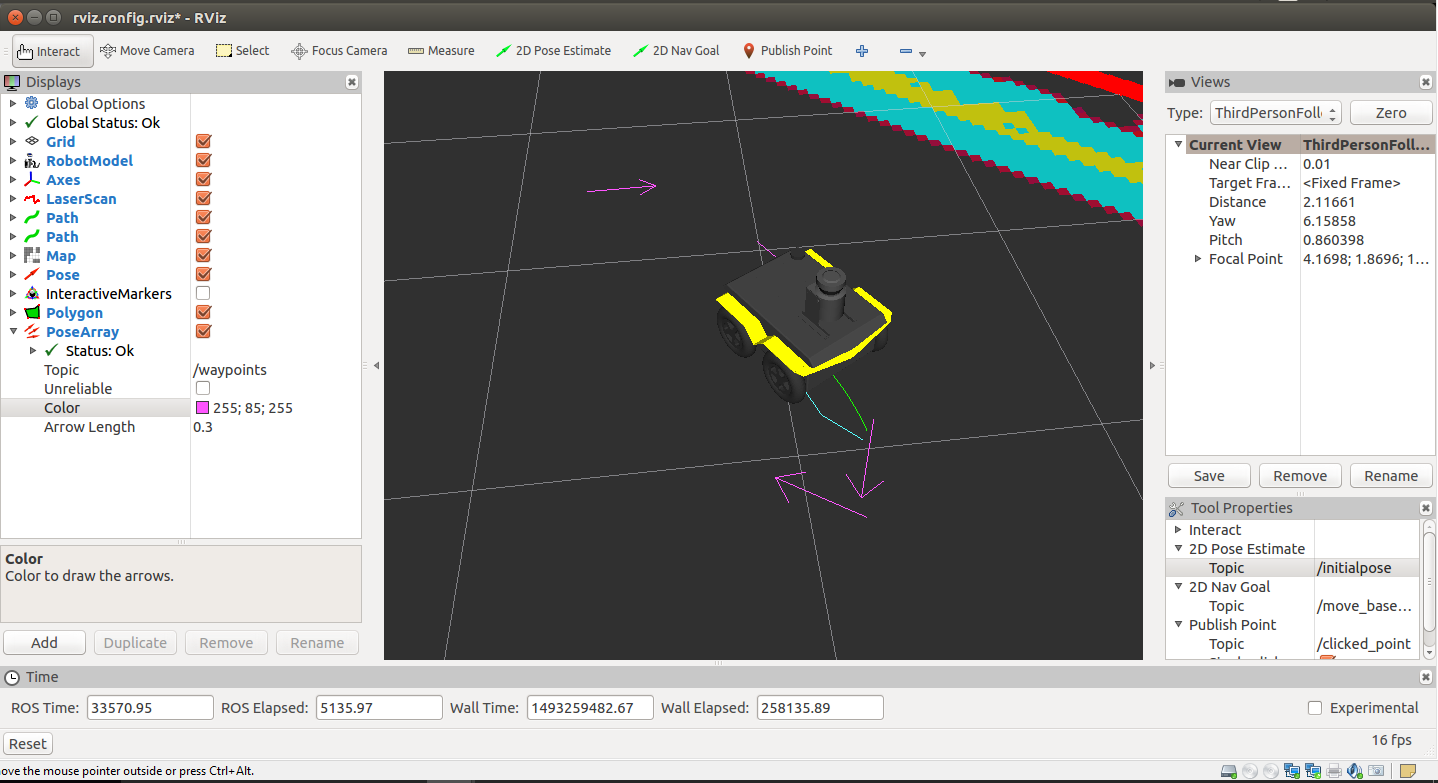
Built a 6-wheeled, 1-armed robot for a University competition in Utah.


Developed highly-available services for OpenStack-based solution.
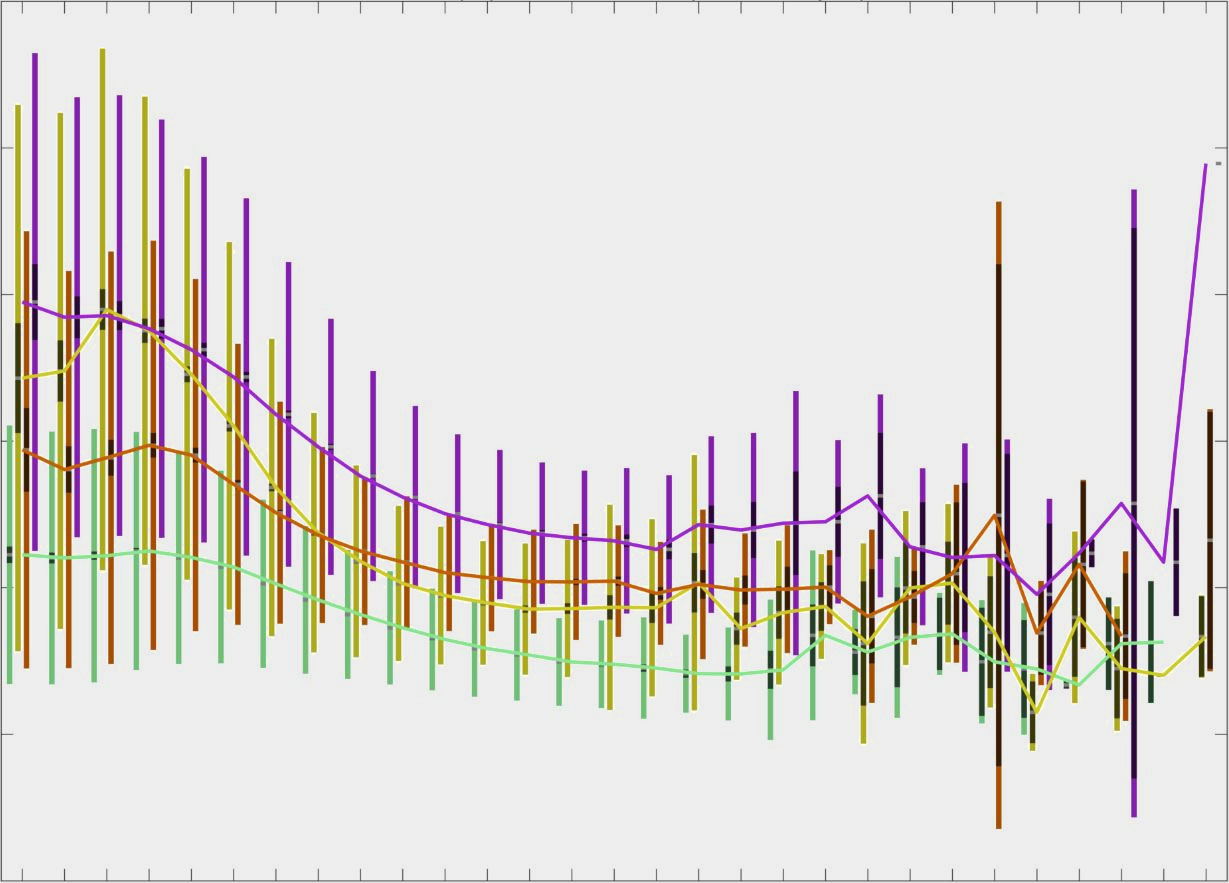
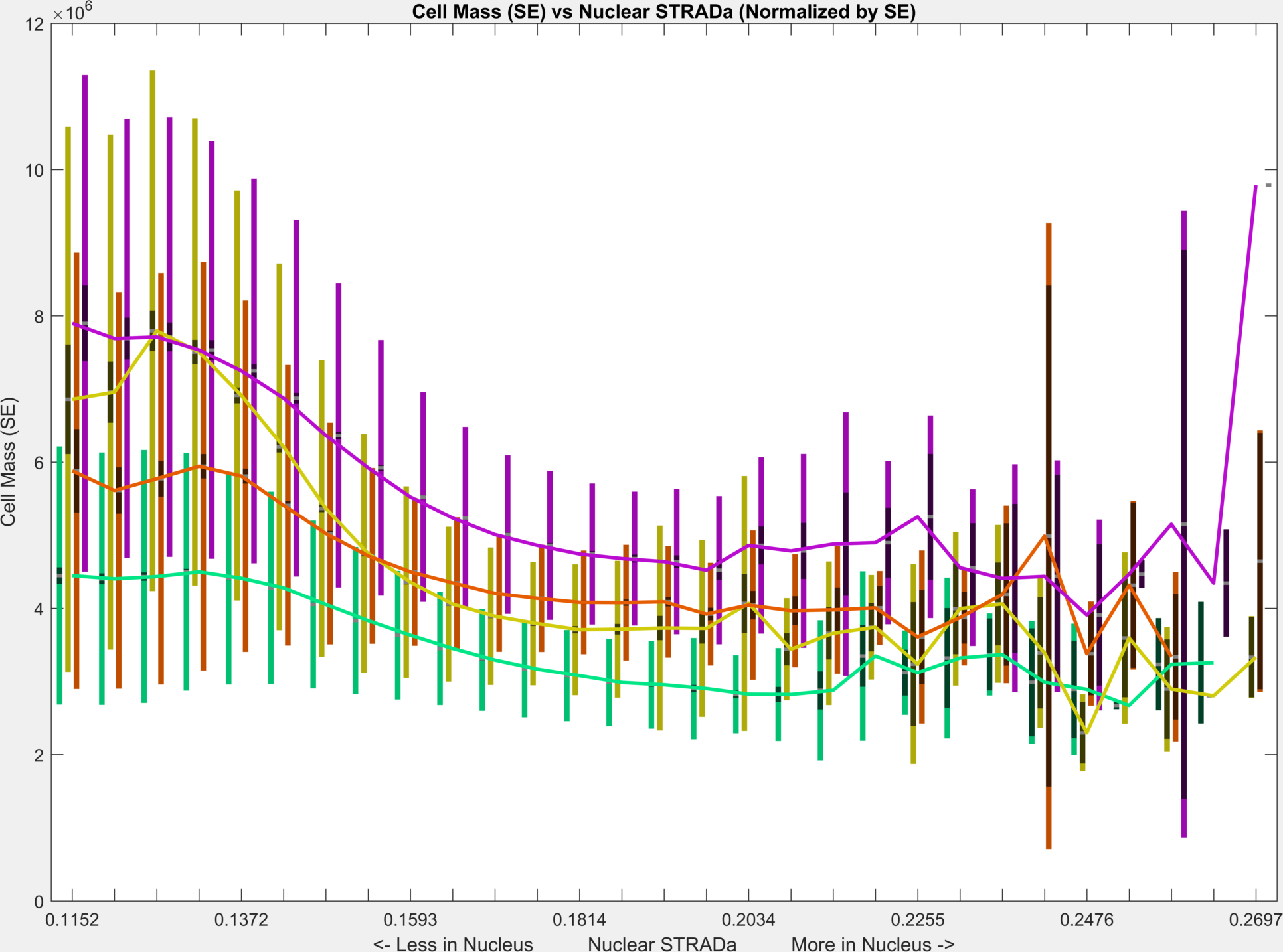
Contributed statistical analysis to 7 journal publications.

Contributed to a reinforcement learning framework for physical robots.
Contributed full-stack features to a web app with 50,000 users.
Massive Scale